A new power paradigm is emerging in automotive design, enabling higher efficiency, simpler architectures and raising a fundamental question: is the 12 V system still relevant?
It is genuinely exciting to witness the pace at which India’s semiconductor and electronics ecosystem is evolving. Across recent exhibitions, one trend stands out clearly which is the shrinking of the turnaround time from prototype to production. This is more than just faster execution, but reflects a maturing ecosystem that is learning from neighboring markets, particularly China, whose remarkable speed of evolution offers lessons that can be thoughtfully adapted to the Indian context.

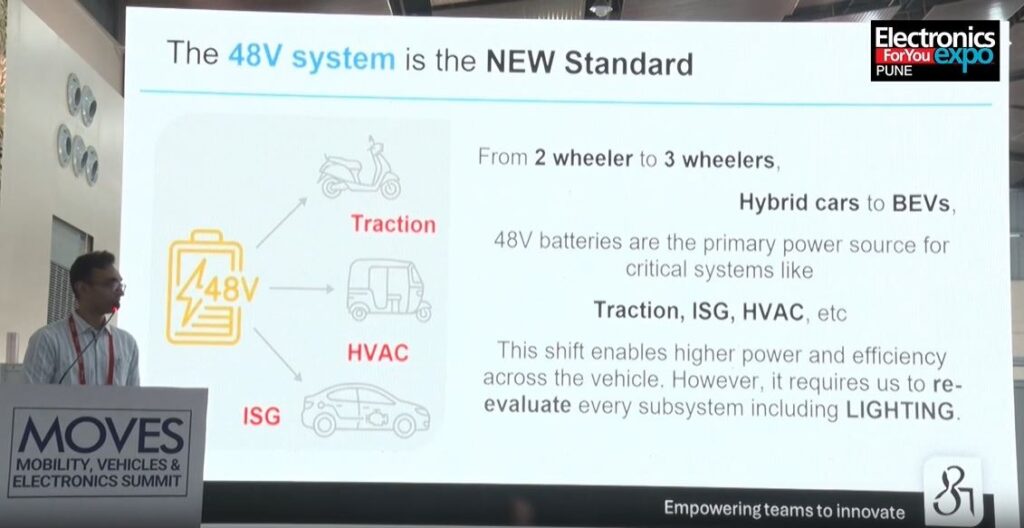
As the ecosystem evolves rapidly, it is equally important for our hardware to advance to keep up with the latest trends. The automotive sector is a good example. Vehicles once ran on 6 V systems, then moved to 12 V lead acid batteries as electrical loads increased, which became the standard. Today, there is a clear shift toward 48 V systems. Modern two-wheelers and three-wheelers are already moving to 48 V and even mild hybrid cars are adopting 48 V batteries.
But are we really transitioning everything to 48 V? The answer is no. Most systems still carry both 12 V and 48 V. That is where I start to question this approach. With the semiconductor solutions available today, do we really need both battery systems in the same vehicle? To me, this also means we need to challenge the long-held assumption that 12 V must always be retained. That is no longer necessarily true.
If I look at the system level, the challenges are quite clear:
- Reducing cost, weight and overall system size
- Simplifying connectors and wiring harnesses
- Improving efficiency and reliability
- Ensuring designs are truly future-ready
In a typical 12 V system, as more features are added, battery load keeps increasing, driving higher circuit complexity. Higher current demand increases cost, weight and size, which is a primary limitation of the existing architecture. Connector design further compounds this. Currents in the range of 3 to 5 amps require larger pins and copper-heavy wiring harnesses, adding both weight and cost. Efficiency suffers, heating increases and reliability becomes a concern. Wherever there is scope to improve reliability, it should be actively considered.
This brings me to a broader question: are our designs really future-ready? As battery systems evolve, the rest of the vehicle architecture should evolve with them. In modern electric vehicles, especially two-wheelers and three-wheelers, the traction or motor controller is already predominantly powered by 48 V. This is true for most scooters and three-wheelers on Indian roads today. Even in cars, systems like H Box or ISG are moving to 48 V. Yet despite this shift, the 12 V battery continues to remain in the system.
Instead of reviewing all 12 V subsystems, let me take lighting as an example. It is no longer just basic on and off. Modern lighting is becoming increasingly sophisticated, with blinking, animation and dynamic behaviour that bring vehicles to life. In a typical two-wheeler, the front lighting system alone draws nearly 40 W across high beam, low beam, DRL and indicators. These loads are usually driven by ~14 V LED drivers using a non-synchronous buck-boost topology involving a diode and a MOSFET and this is where efficiency begins to drop, often approaching 50%.
In conventional architectures, power comes either directly from a 12 V battery or via a 48 V to 12 V converter. The initial 48 V to 12 V conversion itself introduces roughly 10% loss. A DC-DC converter then reduces 48 V to about 14 V for the LED driver, while the buck-boost topology compensates for variations in LED forward voltage. When these stages are combined, overall efficiency drops to nearly 77%. In practical terms, almost one-fourth of total power is lost purely in conversion. Looking deeper, about 25% of the loss comes from circuit conversion, with wiring harness and protection elements such as input diodes pushing total losses close to 30%. Nearly one-third of battery energy is not used effectively.
A native 48 V architecture offers a more efficient path. Instead of stepping down to 14 V, a constant voltage synchronous buck converter can generate an intermediate voltage of 36 to 40 V. This matches typical LED string requirements, where high beam and low beam voltages are around 15 V each and remain below 30 V even in series, enabling more efficient direct driving. Replacing diodes with MOSFETs reduces conduction losses and techniques such as zero voltage switching minimise switching losses, allowing the first stage to reach around 92% efficiency.
This intermediate stage can then feed multiple constant current synchronous buck stages for LED driving, each also operating above 92% efficiency. Combined, overall system efficiency rises to roughly 84.5%, a gain of about 7.5% over conventional approaches. Further reductions in harness, connector and protection losses can add another 5%. Altogether, moving from a 12 V architecture to a 48 V system can deliver a net efficiency gain of 12 to 13%, making a strong case for rethinking power delivery in modern vehicles.
This naturally leads to the concept of an LCM, or Lighting Control Module, a new generation of lighting systems that go far beyond conventional “dumb” controllers by integrating intelligence, communication and centralised control. An LCM typically operates with a single 48 V power input and a CAN or LIN interface that governs all lighting functions. High beam, low beam, daytime running lights and indicators can all be controlled through a single communication port, significantly simplifying the system.
This approach reduces input harness complexity. Instead of multiple connectors and wiring paths, the system can use a single connector with just four pins, two for power and two for communication, while multiple outputs from the same PCB drive individual lighting loads. A single constant voltage buck stage generates an intermediate 36 to 40 V rail, which feeds multichannel constant current drivers for the different lighting functions.
A central microcontroller orchestrates the system, managing CAN commands and enabling capabilities such as seamless switching between lighting modes, real-time diagnostics and temperature-based derating or protection. It can detect fault conditions, like open or short circuits and communicate them over the network. This transforms lighting from a passive function into an intelligent, networked subsystem.
From a system perspective, this creates a highly scalable and efficient platform. Instead of designing separate LED driver hardware for each model, manufacturers can adopt a unified, programmable architecture. Current levels, voltage thresholds and diagnostic features can be configured through software and adapting the system to different models often requires only a reflash. This reduces the need for multiple hardware variants and improves inventory control.
At the same time, the input side benefits from reduced harness complexity in both connection count and current levels. Higher voltage operation leads to efficiency improvements which result in 7 to 12% efficiency gains because of decreased current and lower conduction losses. The LCM concept supports the need for a complete software-based lighting system design.
From a hardware perspective, one of the biggest advantages of this approach is the flexibility. Adapting the system for different vehicle models generally requires only a software reflash, enabling efficient inventory control. A single platform can be reused with programmable current levels and configurable operating parameters, eliminating the need to design, source, or manage multiple hardware variants. At the same time, input harness complexity drops in both connection count and current magnitude and operating at higher voltage improves efficiency by 7 to 12% due to lower current and reduced conduction losses.
Fewer connectors and synchronous circuit topologies also shrink PCB space requirements. Higher efficiency reduces thermal dissipation, removing the need for large heat sinks and allowing a more compact design. Component support for such architectures is already available: Texas Instruments’ LM708 family supports up to 80 V input with 0.8 to 4 A constant current, suitable for four-wheeler lighting, while Monolithic Power Systems offers compact devices rated up to 90 V and 0.9 to 3.5 A for two wheelers. TI’s LMR38025 works well for first-stage conversion and second-stage drivers include LP8865 for cost-effective 65 V, 2 A operation or TPS92543 for advanced adaptive control with multiple LEDs in series, bypass dimming, or dynamic effects. Multi-channel drivers further simplify managing multiple LED strings. For lower current loads such as turn indicators, linear drivers can replace switching regulators, reducing complexity.
The hardware components work together with microcontrollers that support 8-bit, 16-bit, and 32-bit architectures while they manage CAN and LIN networks and process inputs and control LED drivers. The architectural design delivers a simple structure which provides advanced intelligent capabilities together with efficient performance and scalable growth and enables users to operate different vehicle systems and lighting requirements through software-based control.
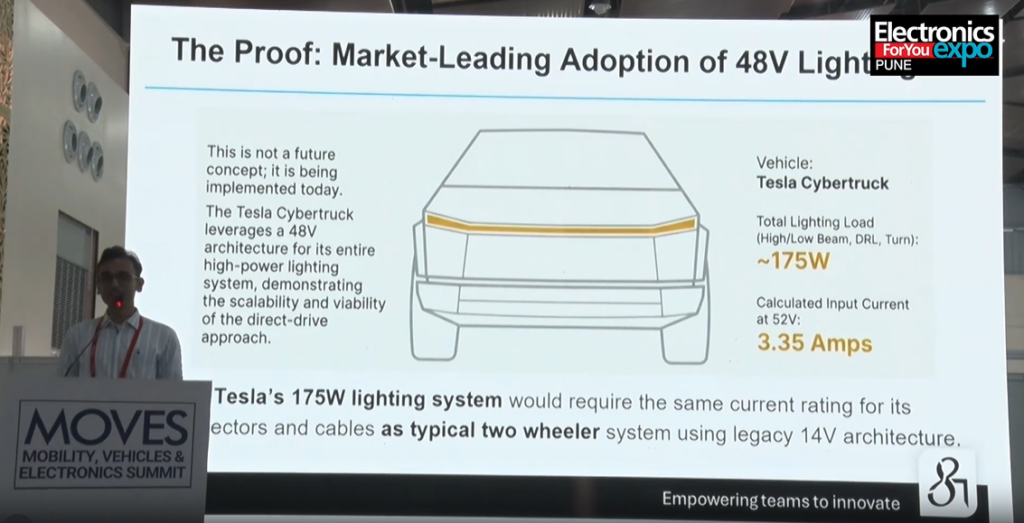
Even from its form factor, this architecture can be readily associated with Tesla. Tesla has effectively removed the standard 12 V battery and now operates using a 48 V system. All lighting loads are powered directly from this setup. In a typical case, the front lighting system uses about 175 W, which is around 3.35 A at roughly 52 V. Notably, this current level is similar to what electric two-wheelers like Bajaj Chetak, Ather 450X, or TVS iQube draw from a 12 V system.
This key insight highlighted here is that despite the current operating voltage requiring different connector specifications, the connector design requirements maintain their existing specifications because the operating current remains at the same level. The 48 V system architecture maintains its practical implementation capacity because connector design limits for creepage distance remain unchanged below 60 V voltage thresholds. The evidence supports the transition to 48 V systems because it demonstrates their effectiveness in real world situations.
In summary, as illustrated through the lighting example, a wide range of IC solutions is already available across applications, whether in two wheelers or four wheelers, covering loads such as lighting, window winders, audio systems and instrument clusters. Just as the industry once transitioned from 6 V to 12 V, the ecosystem is now well positioned for a shift from 12 V to 48 V and this transition is most effective when adopted holistically rather than partially.
From a performance standpoint, the benefits are substantial. Overall system efficiency can improve by approximately 7.5 to 12%, while input current can be reduced to nearly one third in worst case scenarios and typically closer to one fourth. In addition, since a significant portion of the load, nearly 30%t from lighting alone, can be offloaded, DC DC converter sizing can be reduced, leading to savings in both cost and space. The use of more integrated, synchronous components further reduces PCB footprint and eliminates the need for external MOSFETs.
By using a platform-based design, a single hardware solution can work across multiple vehicle models or OEMs with minimal tweaks. The result is a system that saves cost at the ECU, harness, and connector level, while being more efficient, compact, scalable, and ready for the future of automotive design.
This migration allows the industry to address several critical objectives at once, with miniaturization emerging as a key driver. Across electronics, from mobile devices to advanced test equipment, the form factors are steadily shrinking. Even exhibition instruments like oscilloscopes, once bulky, are now increasingly compact, reflecting the broader direction of the ecosystem.
As this evolution continues, the system design priorities must align accordingly, balancing miniaturisation with efficiency and cost optimisation. This ensures future architectures are not only more compact but also energy-efficient and economically viable. In this context, I am keen to collaborate with anyone interested in early-stage prototyping or exploring similar architectures.
The article is based on the talk at the EFY Expo Pune 2026 called ‘Rethinking Automotive Lighting for the 48V Era’ featuring a speech by Mahendra Patel, Electronic Design Consultant, AIGHTECH Services Pvt Ltd, India. It has been transcribed and curated by Saba Aafreen, Tech Journalist at EFY.